- Nanometer-scale depth precision at 1.42 m standoff
- Analog signals kept alive longer
- Balanced subtraction cuts shared noise
- Vibration and turbulence still limit the floor
If you try to judge depth from two viewpoints, tiny measurement losses can blur the result fast. This paper tackles that problem in passive triangulation, where a point source is located from angular disparity between two laterally spaced detectors. The key idea is simple: keep the analog signal alive longer and reject common-mode noise instead of throwing away information in the measurement pipeline. The authors also review the Cramér-Rao bound, a standard limit on how precisely angle sensing can work, and build a monolithic camera/balanced detector system with a doubly layered analog voltage differential system. In experiments, they report nanometer-scale depth precision at a 1.42 meter standoff using only a 10 centimeter baseline. That is still about two orders of magnitude above the shot noise limit, but it is several orders of magnitude better than current camera-only or other position-sensitive detector systems. The result shows that careful system design can push triangulation much closer to its fundamental limit, with even more improvement possible through vibration and turbulence mitigation.
Ten centimeters is not much space. Yet this setup found depth with nanometer-scale precision at a 1.42 meter standoff. That is a billionth of a meter. If you have ever watched your own eyes guess distance, you know the weak spot. Far away, depth clues get thin fast. This work says the bottleneck is not only physics. It is also the signal pipeline. Keep the analog signal alive longer. Triangulation can move closer to its hard limit. The surprise is that careful plumbing matters as much as the light itself. That shift sounds small. It is not. It changes where the loss happens. It moves the loss from the light to the math.
What the 10-centimeter baseline really bought
The system reached nanometer-scale depth precision at 1.42 meter standoff with only a 10 centimeter baseline. That is several orders better than current camera-only or other position-sensitive detector systems. A position-sensitive detector is a device that tells you where light lands. The paper also says the result is still about two orders of magnitude above the shot noise limit. Shot noise means the random flicker that comes from counting light in tiny pieces. The Cramér-Rao bound sets the best precision an angle sensor can ever reach. The work uses that bound to frame the gap between today’s result and the hard floor. The key point is simple. The system keeps more useful information than older pipelines. That preserved detail turns into much sharper depth.
How the signal stays alive long enough
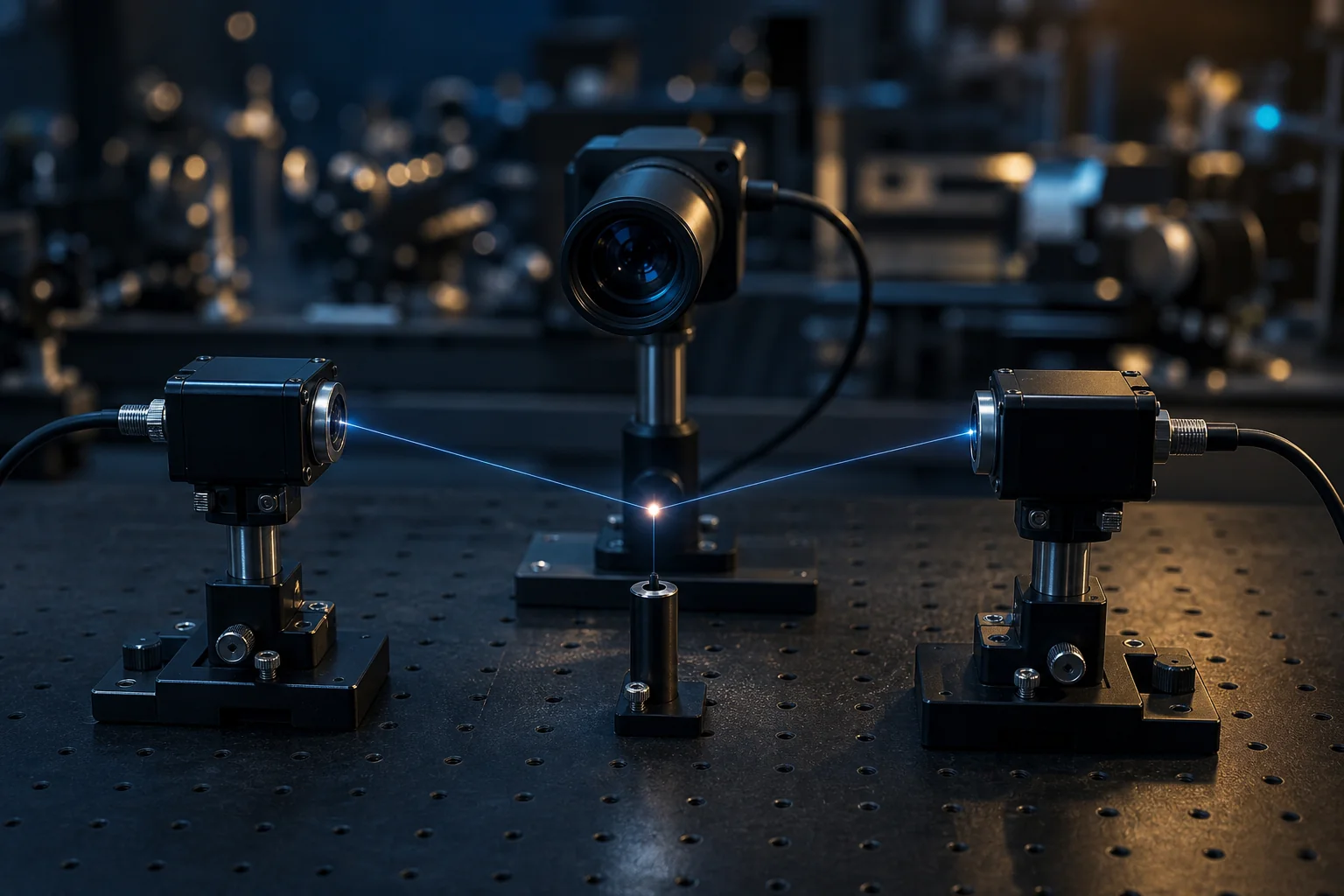
One part of the rig is a monolithic camera and balanced detector system. Monolithic means built as one unit. The camera finds the spot. The balanced detector watches both sides and subtracts shared noise. Shared noise means the same shake or drift appears in both channels. The second part is a doubly layered analog voltage difference system. That is two stages of analog subtraction before the signal becomes digital. This order matters because digitizing too early can throw away tiny clues. The design keeps the signal analog longer. Then it strips out the common junk. What survives is the small angle cue that depth needs.
at 1.42 m standoff
camera-only systems- Robotics needs depth to reach and avoid objects.
- Navigation uses depth to place a machine in space.
- Autonomous vehicles need depth to judge the road ahead.
- Augmented reality uses depth to keep virtual objects steady.
“We preserve that information through maintaining analog signals combined with common-mode noise rejection in the layers of signal processing.”
“existing systems lose fundamental information in the measurement pipeline.”
Why this matters for depth sensing
Triangulation matters anywhere a system must read depth from two views. That includes robotics, navigation, autonomous vehicles, augmented reality, aerial mapping, and medical uses. The gain here is not a new trick for one narrow lab setup. It is a lesson about signal care. Keep the original analog clue alive. Then subtract shared noise before the clue gets flattened into digits. That change gives several orders of improvement over camera-only and other position-sensitive detector systems. It also points to a path toward the shot-noise floor. Better vibration control and less air wobble should help. The design lesson is plain. Better depth can come from better listening, not just stronger light.
What comes next for the baseline
The next test is a version with vibration and turbulence mitigation. Those fixes come from the abstract. They should push the setup closer to the shot-noise floor. That floor is where random photon counts, not sloppy signal handling, set the limit. The surprise from the start still holds. The weak link is not just the light. It is the measurement chain around it. If the chain keeps analog detail alive a little longer, long-range depth sensing can keep tightening. That would turn a 10 centimeter baseline into a much sharper ruler at meter scale.
Comments